
AcWing-112.雷达设备
¶首先来首歌曲来放松一下吧!
题目链接:112. 雷达设备
¶题目背景:
同样是贪心问题!
¶题目描述
假设海岸是一条无限长的直线,陆地位于海岸的一侧,海洋位于另外一侧。
每个小岛都位于海洋一侧的某个点上。
雷达装置均位于海岸线上,且雷达的监测范围为d,当小岛与某雷达的距离不超过d时,该小岛可以被雷达覆盖。
我们使用笛卡尔坐标系,定义海岸线为x轴,海的一侧在x轴上方,陆地一侧在x轴下方。
现在给出每个小岛的具体坐标以及雷达的检测范围,请你求出能够使所有小岛都被雷达覆盖所需的最小雷达数目。
¶输入格式
第一行输入两个整数n和d,分别代表小岛数目和雷达检测范围。
接下来n行,每行输入两个整数,分别代表小岛的x,y轴坐标。
同一行数据之间用空格隔开。
¶输出格式
输出一个整数,代表所需的最小雷达数目,若没有解决方案则所需数目输出“-1”。
¶数据范围
1≤n≤1000
¶输入样例:
1 | |
¶输出样例:
1 | |
¶题目分析:
¶题目要求:
简单来说,就是给一条数轴,在数轴上方有一些点(小岛),要在数轴上放置雷达,使得可以使每个点都被覆盖住!
求达到目的的最小雷达数目!
¶解题思路:
雷达有一个半径值,当然处于半径内则可以覆盖!
首先先考虑一个点(x,y),要想使得数轴上的雷达可以探测到,必须处于半径范围内,左右可以拓展的距离最大就是以点(x,y)往出拉一条雷达的半径d,与数轴的交点就是可以拓展的最大距离,即只要在[a,b] 范围内就可以保证当前点处于雷达可探测范围!
如下图:
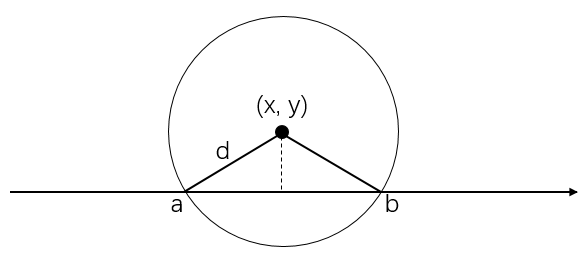
若发现无交点,即当前点太高,即使雷达放在正下方都够不着,超过了雷达的范围,则直接返回-1即可!
判断条件:y > d 时!够不着!
计算区间a,b值可以利用勾股定理即可!
这样我们可以得到每一个点的雷达取值区间,现在问题就从二维变为了一维的区间问题!
具体解法:
- 我们可以给每个区间按照右端点从小到大排序!
- 扫描每一个区间,看这个区间内是否有雷达?
- 若没有雷达,则在当前区间右端点放置一颗雷达
- 若有雷达,则跳过即可
具体解释一下:
排好序后,如果前面有一个雷达则去看一下雷达有没有在当前点的区间,要知道:只有在当前点的区间内才能够得着这个点!
为了尽可能的使放一个雷达可以最好,最大的服务后面的的点的区间,可以将每个雷达放到该点区间的右端点即可!
既可以保证当前点被覆盖,又可以保证距离下一个点最近,达到最优的效果!
最后的最少的雷达数就是区间上可以放置的雷达数,即进去if条件的次数!
证明可以看一下下方yxc大神的证明!
¶题解:
下一个区间要想判断是否在雷达的左或右边,可以简单的用一个last指针来动态指向雷达的位置,若区间没有雷达,则将last置为当前区间的右端点,否则跳过即可!
注意:因为勾股定理需要开方,所以区间使用double来存储!
数轴是正无穷到负无穷级别的,所以将last初值赋为负无穷大!
具体参考代码理解!
1 | |
 微信
微信 支付宝
支付宝


